The REXASI-PRO project involves coordinating various agents to create a collaborative environment that is both efficient, safe and useful for the end user. A central orchestrator has been developed to manage information from the field and provide decision-making support.
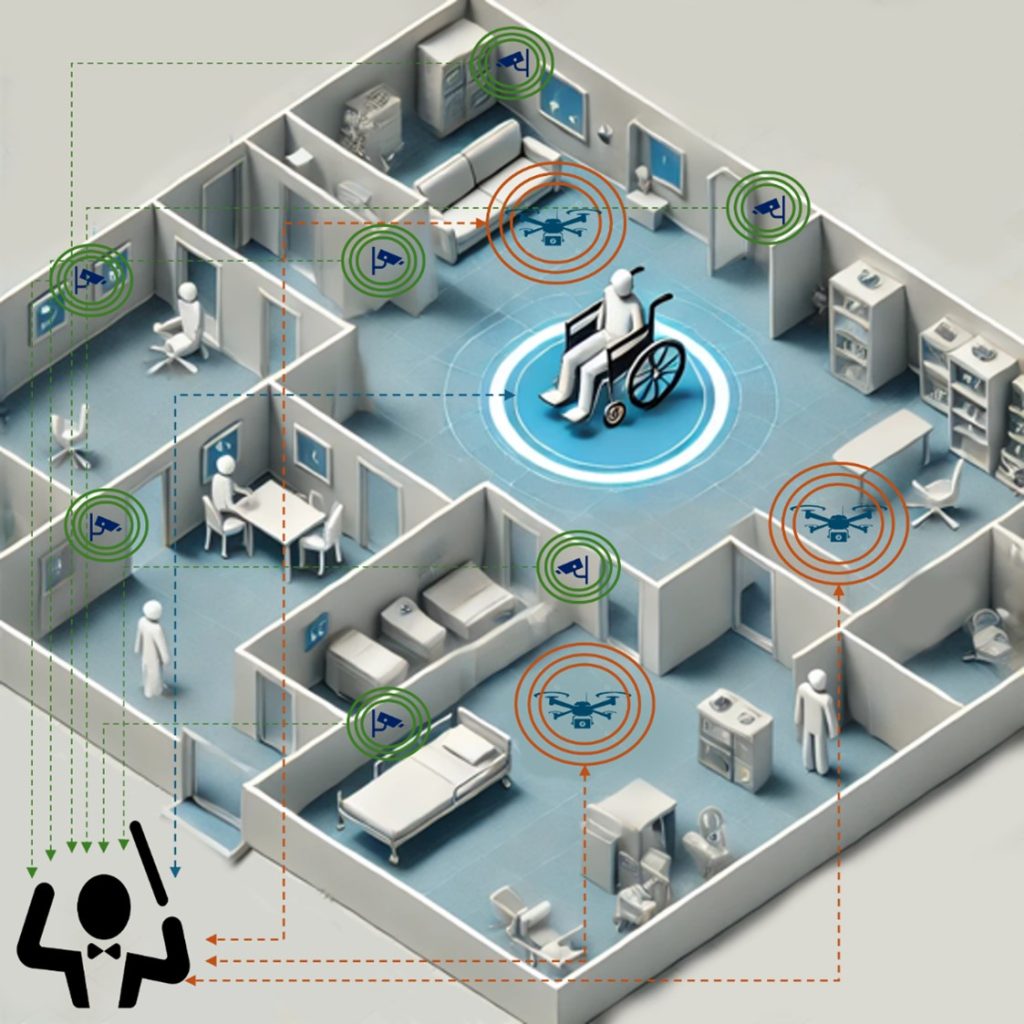
The end user operates a smart wheelchair equipped with multiple sensors, enabling safe local navigation, and seeks to be guided to a specific location within a building. While the wheelchair is capable of navigating to its target, it lacks awareness of how others in the shared environment are moving. This limitation can result in the wheelchair becoming trapped in crowded areas, compromising safety for both the user and others, and increasing travel time.
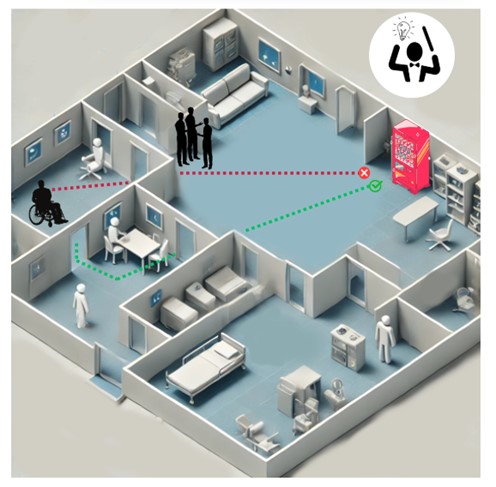
To address these challenges, the orchestrator computes a safe and efficient path for the wheelchair, taking into account the movements of other individuals. The environment is monitored by a network of fixed cameras capable of detecting moving people. However, since not all areas can be covered by stationary cameras, a fleet of flying robots is employed to monitor uncovered regions.
These flying robots are managed collaboratively by the orchestrator. When the wheelchair is stationary, the flying robots continuously monitor the entire environment not covered by cameras. However, when the wheelchair begins moving toward a target location, the orchestrator dynamically deploys the flying robots to areas critical to the wheelchair’s path. For example, they may be sent ahead to check for crowded areas or positioned near the current route to identify potentially better paths based on real-time pedestrian movement.
In this way, by leveraging data from both flying robots and fixed cameras, the orchestrator can continuously monitor the crowd distribution and use this information to navigate the wheelchair safely and efficiently through crowded environments.