special edition for rexasi-pro
Overdata Research
Overdata Research is the magazine of the Spindox Group dedicated to R&D topics. In this special edition features valuable contributions tell the REXASI-PRO Project.

blog
News & Updates

From the Demo Days to the General Assembly, last important steps towards the conclusion of the project
From the Demo Days to the General Assembly, last important steps towards the conclusion of the REXASI-PRO project.

Multi-agent navigation: communication
This is the last of three parts that describe developments related to multi-agent navigation carried out by SUPSI in the context of REXASI-PRO....

Multi-agent navigation: learning
This is the second of three parts that describe developments related to multi-agent navigation carried out by SUPSI in the context of REXASI-PRO....

Multi-agent navigation: simulation
This is the first of three parts that describe developments related to multi-agent navigation carried out by SUPSI in the context of REXASI-PRO....
For a real-time person detection on resource-constrained robotic platforms and embedded systems
In an effort to enhance the computational efficiency and resource consumption of the DR-SPAAM (Distance Robust Spatial-Attention and Auto-regressive...

Towards Reliable Predictions under Adversarial Attacks: Introducing Verifiably Robust Conformal Prediction (VRCP)
At NeurIPS 2024, we introduced Verifiably Robust Conformal Prediction (VRCP) — a new framework that brings statistical reliability and provable...

Formal Guarantees for Memoryful Neural Agents in Multi-Agent Systems
A novel verification framework empowers formal reasoning over recurrent neural multi-agent systems under non-determinism and uncertainty. We...
Cybersecurity for Safety: Risk Assessment of Autonomous Cyber-Physical Systems
Discover a new risk assessment methodology for autonomous CPS, focusing on safety and security, with a case study on autonomous wheelchairs and drones.

Experimental Evaluation of Road-Crossing Decisions by Autonomous Wheelchairs against Environmental Factors
Discover how environmental factors like fog, rain, and darkness impact autonomous wheelchair road-crossing safety. This study fine-tunes tracking performance using multi-sensor fusion to enhance accuracy and reliability.

The Orchestrator: how to manage different agents in a way that is useful for the end user
A central orchestrator optimizes smart wheelchair navigation, ensuring safety and efficiency in crowded spaces.
Reliable AI Methods for Collision-Free Navigation
Today’s world is boosting with powerful technologies and Artificial Intelligence (AI) solutions, finding fertile ground in many fields, including...
The “Dalle Molle Award for the Quality of Life Label”
The “Dalle Molle Award for the Quality of Life Label” ceremony was held last Nov. 15 at the East Campus Lugano. The research group in Trustworthy...

Research and development phase of automatic wheelchair guidance models
The scope of REXASI-PRO Project includes developing and implementing advanced navigation solutions for wheelchairs and drones in diverse settings,...
Safety Analysis with Ethics in-the-loop at IRIM-3D 2024
REXASI-PRO landed at the 6th Italian conference on Robotics and Intelligence Machines (IRIM-3D), helded in Rome, 25-27 October 2024, presenting the...

Conformal Off-Policy Prediction for Multi-Agent Systems (MA-COPP)
In the world of autonomous systems, ensuring safety when new and untested control strategies are introduced is a key challenge.
Data reduction for green artificial intelligence
September 26, 2024Artificial intelligence (AI) has become a big part of our daily lives, helping industries and making many tasks easier, from...
Generating synthetic data for training purposes
The REXASI-PRO project uses machine learning (ML) to control wheelchair motors using a deep neural network (DNN-LNA) that interprets sensor data....

Dalle Molle Foundation competition and award of the «Quality of Life» label
The research group in Trustworthy Autonomous Systems at the Dalle Molle Institute for Artificial Intelligence (IDSIA USI-SUPSI) won first place in...

Showcasing collaborative social navigation at XAI 2024
On July 18th, we present an interactive demonstration of collaborative social navigation at the 2nd World Conference on eXplainable Artificial Intelligence (https://xaiworldconference.com/2024).

Safe Road-Crossing by Autonomous Wheelchairs by information fusion
For our work, we have focused on a road-crossing scenario for the swarm system composed by an autonomous wheelchair and a drone, using multiple...

REXASI-PRO Review Meeting
As scheduled for the eighteenth month after the start of the project, REXASI-PRO’s review meeting took place last April. The aim of the meeting...

Trials for the first neural network aimed at detecting people and wheelchairs to support autonomous wheelchair driving
The REXASI-PRO project has reached its midway point. Over the past 18 months, Aitek, along with other partners, has been dedicated to designing a...

How to explore the captivating realm of virtual reality
Scuola di Robotica and SUPSI, supported by Consiglio Nazionale delle Ricerche, Aitek S.p.A., DFKI and Spindox organized a virtual reality demo event...

A Virtual Reality simulation Demo
We present a demonstration of the setup we are using to test navigation algorithms with humans-in- the-loop
Nine EU projects collaborate for Trustworthy AI across Europe
Nine projects funded under the Horizon Europe call, HORIZON-CL4-2021-HUMAN-01-01, will help pave the way for the greater acceptance of Artificial...

Originality and reliability of REXASI-PRO Horizon Europe project
Artificial Intelligence is applied in many areas of technological development today. We find it with increasing frequency where human-machine...

More about Aerial Flying robot use-case: mapping procedure
During the REXASI-PRO project the main developments for the mapping procedure can be divided into two lines of work: the hardware part and the...

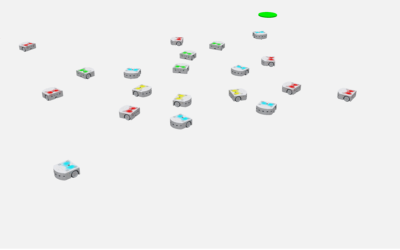
Cooperative navigation in a virtual reality. How does it work?
In REXASI-PRO, we develop algorithms that let smart wheelchairs navigate indoor spaces populated by people. We test them in simulation to make sure...

How to recognise people trajectories. The first version of a robust people tracker.
A trustworthy AI system must be well perceived by the humans interacting with it. One of the REXASI-PRO components that is more impacted by this...

Learning-Based Approaches to Predictive Monitoring with Conformal Statistical Guarantees
A tutorial paper in collaboration between King's College London and University of Trieste on conformal prediction for predictive monitoring was...

Software module and hardware components for the REXASI-PRO 3D Driving Assistant
The REXASI-PRO 3D Driving Assistant (3DDA) is a software module that safeguards driving commands for electrically powered wheelchairs. Driving...

Special track on xAI for Trustworthy & Responsible AI (CNR+USE)
The participants to our project, Maurizio Mongelli (Italian National Research Council) and Rocio Gonzalez Diaz (University of Seville) will chair...

Sixth EACA International School on Computer Algebra and its Applications
Prof. Rocio Gonzalez-Diaz, coordinator of the University of Seville node of the REXASI-PRO project, will participate as a speaker in the Sixth EACA...

Safety Analysis Workshop
Jun 23, 2023 A three-day internal discussion on artificial intelligence systems suitable for ensuring security and reliability in project...

Graphic modelling contest
How to engage young forces in an elaboration process that also requires inventiveness? Our partners at Universidad de Sevilla have organized a...

Accepted paper at HSCC 2023
Nicola Paoletti from King’s College London, in collaboration with researchers from Università degli Studi di Trieste, has got a paper...

Establishing the next level of “intelligence” and autonomy
The first Clustering Workshop between projects funded by the Horizon Europe programme under Research and Innovation Actions.

REXASI-PRO: the kick-off meeting
REXASI-PRO to support people with reduced mobility by means of autonomous and trustworthy social navigation systems based on AI.