On July 18th, we present an interactive demonstration of collaborative social navigation at the 2nd World Conference on eXplainable Artificial Intelligence (https://xaiworldconference.com/2024).
Participants move among virtual autonomous wheelchairs in Extended Reality and experience how their behavior influences the surrounding robots’ navigation. They observe how different navigation algorithms affect the legibility and predictability of the robotic wheelchairs, which in turn influences the participants’ actions. They also experience how exposing robots’ intentions impacts the intuitive explainability of the individual and collective behaviors of the robots.
The demonstration is part of the REXASI-PRO effort to improve the ability of smart wheelchairs to navigate shared spaces in a safe, efficient, and friendly way. Developing robots to be deployed around people requires testing with humans-in-the-loop: only humans co-located with the robots are in a suitable position to judge the robots’ behaviors. Therefore, we let real people experience the interaction using the Virtual/Mixed Reality tools we are developing in the project.
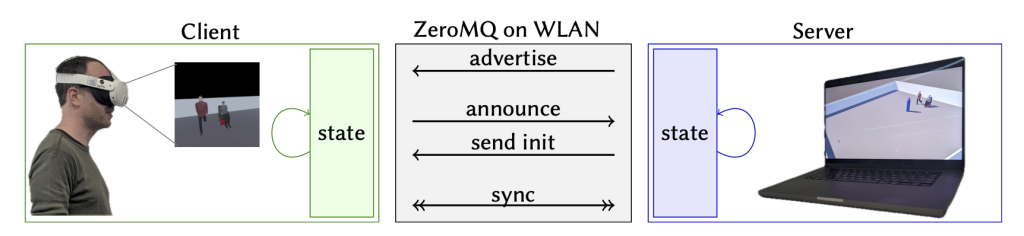
The visualisation on the VR headset is synchronized via WiFi with the social navigation simulation running on a laptop.
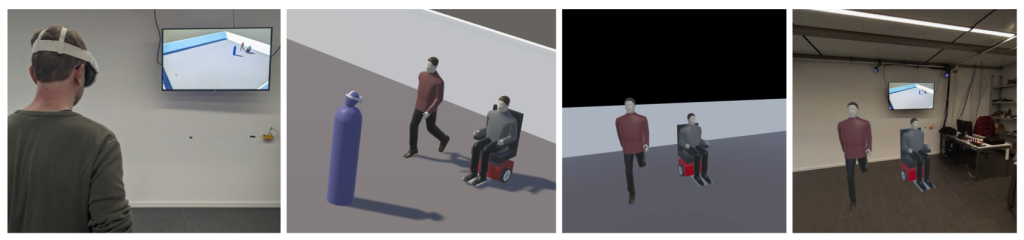
Left: A participant in the demonstration observes a virtual pedestrian and a virtual user of an autonomous wheelchair navigating, while a screen displays the scene.
Center-left: A magnification of the view shown on the screen with the participant’s avatar in blue.
Center-right and right: The participant’s first person view, as rendered by the headset, in Virtual (center-right) and Mixed Reality (right).
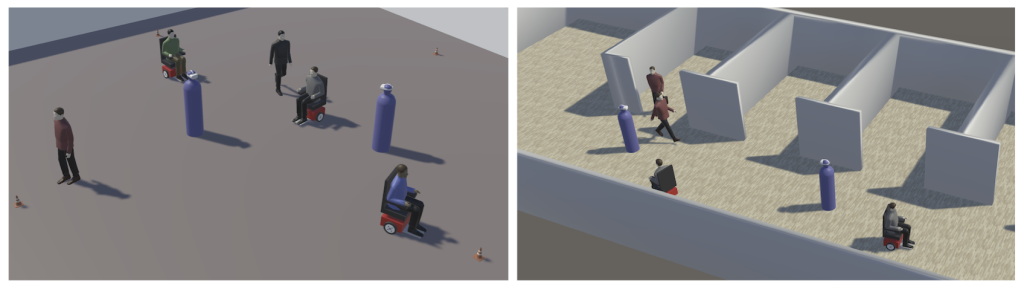
Two participants (blue avatars) sharing the experience of immersing in two different scenarios.
In the main track of The 2nd World Conference on Explainable Artificial Intelligence, REXASI-PRO presents like a consortium other two papers:
1. Javier Perera-Lago, Víctor Toscano-Durán, Eduardo Paluzo-Hidalgo, Sara Narteni and Matteo Rucco (USE + CNR)
“Application of the representative measure approach to assess the reliability of decision trees in dealing with unseen vehicle collision data”
2. Sara Narteni, Alberto Carlevaro, Jerome Guzzi and Maurizio Mongelli (CNR + SUPSI)
“Ensuring Safe Social Navigation via Explainable Probabilistic and Conformal Safety Regions”